Одновременное использование двух приемников GPS

Одновременное использование двух приемников GPS
В работе рассмотрены принципы обработки данных о местоположении движущегося судна, поступающих от двух разнесенных на объекте приемников GPS. Определены методы «отсеивания» недостоверных измерений: по геометрическому фактору точности HDOP, количеству используемых для решения неопределенности спутников, сравнении полученных по результатам измерений расстояний между приемниками с заранее известной величиной разнесения.
The foundations of movable vessel’s position data proceeding from two distant GPS-receivers has been considered in the work. Methods of filtering inadequate measurements by geometrical factor of dilution of precision HDOP, number of satellites using in ambiguity solving, comparison obtained in measurements distance between GPS-receivers with known diversity value has been worked out in the paper.
1.Введение
Современные средства спутниковой навигации позволяют определять местоположение габаритного объекта с точностью, превышающей в несколько раз габаритные размеры самого объекта. Поэтому, знание местоположения только центра масс морского подвижного объекта становиться недостаточным, например, при маневрировании в ограниченных акваториях или движении по каналу. В таких случаях для судоводителя является важным знание действительного местоположения всех или нескольких точек объекта. Для судна, как твердого тела, достаточно знать положение только двух точек, чтобы определить положение любой точки. Навигацию, основанную на описанной выше информации, можно назвать «двухточечной» (Пашенцев С.В., 2000).
При использовании двух разнесенных приемников GPS мы получаем информацию о местоположении двух точек объекта. Необходимо оценить достоверность получаемых данных для дальнейшего использования их при построении истинной траектории движения или зоны навигационной безопасности судна.
2.Оценка экспериментальных данных
В отличие от профессиональных судовых приемников GPS в нашем распоряжении для проведения натурных экспериментов имелись два 32-х канальных приемника «Qstars BT-Q818», выполненные на чипсете MTK. Поэтому, кроме разработанного программного модуля обработки выходного протокола данных NMEA-0183, необходимо было построить алгоритм фильтрации сигнала для определения грубых промахов в измерениях, который в судовых приемниках выполняется автоматически и незаметно для конечного пользователя. Необходимо отметить, что первоначально приемники отказывалась принимать внешние управляющие команды, и для полноценной работы потребовалась небольшая доработка по впайке резистора в каждый приемник.
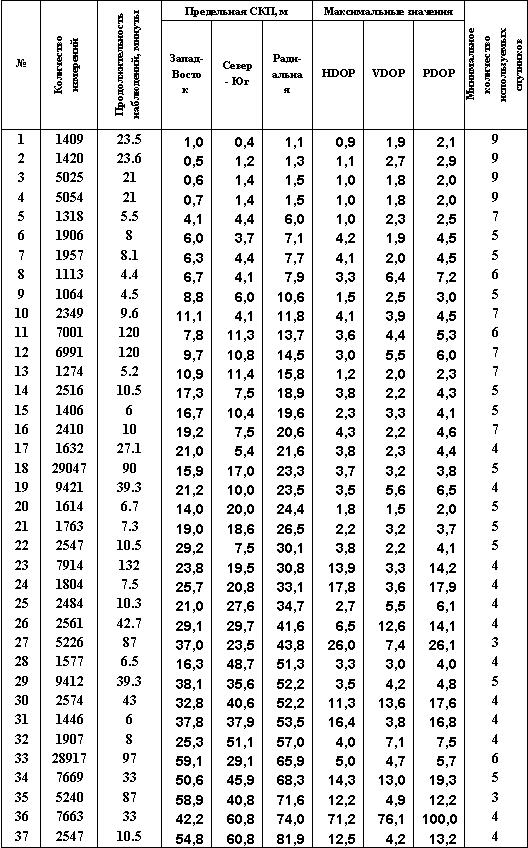
В табл. 1 и 2 представлены результаты обработки экспериментальных данных, полученных в различных условиях на неподвижных объектах.

 На рис. 1 представлены графики, построенных по экспериментальным данным модельных функций, предельной СКП места в зависимости: от среднего значения геометрического фактора точности и среднего количества, используемых для решения неопределенности спутников (верхний ряд); от максимального значения геометрического фактора и минимального количества используемых для решения спутников (нижний ряд).
На рис. 1 представлены графики, построенных по экспериментальным данным модельных функций, предельной СКП места в зависимости: от среднего значения геометрического фактора точности и среднего количества, используемых для решения неопределенности спутников (верхний ряд); от максимального значения геометрического фактора и минимального количества используемых для решения спутников (нижний ряд).
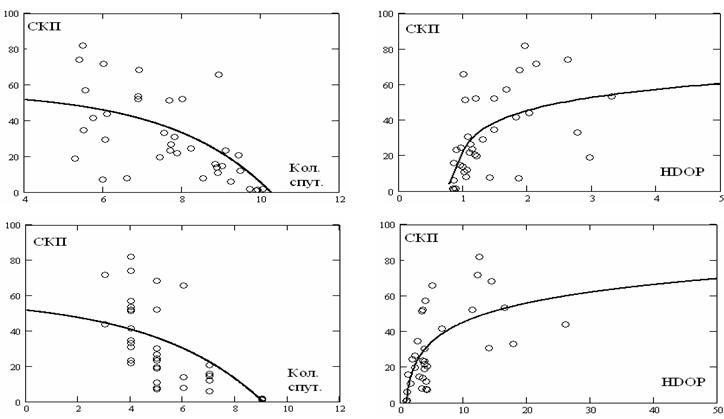
Рис.1 Зависимость СКП от количества используемых спутников и геометрического фактора точности
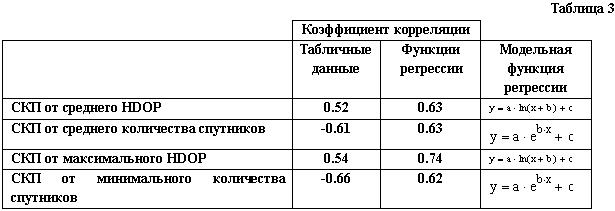
В табл. 3 представлены коэффициенты корреляции наблюденных данных и построенных модельных функций. Как видно из графиков и произведенных вычислений, СКП местоположения, имевшихся в нашем распоряжении приемников GPS, зависит, как и от количества используемых при решении спутников, так и от геометрии их созвездий. Точность определения местоположения возрастает при наличии избыточных наблюдений и низком HDOP.
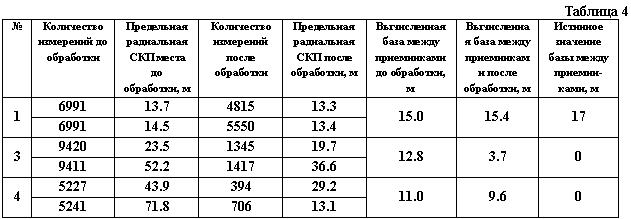
 Основываясь на полученных ранее данных, в качестве «фильтра» обрабатываемого сигнала выберем минимальные значения двух критериев, при которых СКП определения места удовлетворяет нашим требованиям (предельная радиальная СКП < 20м). Во время программной обработки сигнала, мы будем отбраковывать те измерения, в которых количество одновременно используемых спутников для решения неопределенности N<8 и геометрический фактор точности HDOP>1. Действие такого «фильтра» можно посмотреть по данным табл. 4, где представлены результаты вычислений по исходным и обработанным, с использованием вышеуказанного фильтра, данным. Как видно после такой обработки данных предельная радиальная СКП каждого приемника уменьшается, а при использовании двух приемников увеличивается точность вычисления расстояния между приемниками (базы).
Основываясь на полученных ранее данных, в качестве «фильтра» обрабатываемого сигнала выберем минимальные значения двух критериев, при которых СКП определения места удовлетворяет нашим требованиям (предельная радиальная СКП < 20м). Во время программной обработки сигнала, мы будем отбраковывать те измерения, в которых количество одновременно используемых спутников для решения неопределенности N<8 и геометрический фактор точности HDOP>1. Действие такого «фильтра» можно посмотреть по данным табл. 4, где представлены результаты вычислений по исходным и обработанным, с использованием вышеуказанного фильтра, данным. Как видно после такой обработки данных предельная радиальная СКП каждого приемника уменьшается, а при использовании двух приемников увеличивается точность вычисления расстояния между приемниками (базы).
 3.Оценка расстояния между приемниками
3.Оценка расстояния между приемниками
Поскольку расстояние L между приемниками нам известно с высокой точностью заранее (например, приемники разнесены по оконечностям судна на его длину), то вычисленное по полученным от приемников координатам расстояние между антеннами можно сравнивать с «истинной» длинной базы, соответственно, выбрав критерий «отсева» получаемых при движении судна координат, таким образом, чтобы расчетная величина L не превышала заданных пределов. Данный принцип актуально применять на подвижном судне, когда из-за постоянного изменения позиции судна набрать достаточную статистику и точно оценить СКП места представляется затруднительным.
4.Заключение
При обработке координат движущегося объекта с применением двух разнесенных приемников GPS, кроме оценки величины геометрического фактора потери точности HDOP и количества одновременно наблюдаемых спутников; для проверки достоверности определения местоположения объекта, целесообразно по полученным координатам вычислять расстояние между приемниками. Далее сравнивать полученную величину с истинным значением «базы», принимая полученные координаты в случае попадания в заранее определенный интервал с заданным значением надежности. Недостатком данного метода является отбрасывание координат от обоих приемников, если фактически только один из них дает точное местоположение, а второй с большой погрешностью. Положительным моментом данного метода является то, что при вычислении расстояния между двумя одинаковыми приемниками, величина L свободна от систематических погрешностей.
Авторы Кораблев В.Г., Пашенцев С.В., Юдин Ю.И.
МГТУ, Судоводительский факультет, кафедра судовождения
Подготовил Виктор Зорин
Источник: GPSClub.ru





